Recent Works
Viewing Robot Navigation in Human Environment as a Cooperative Activity
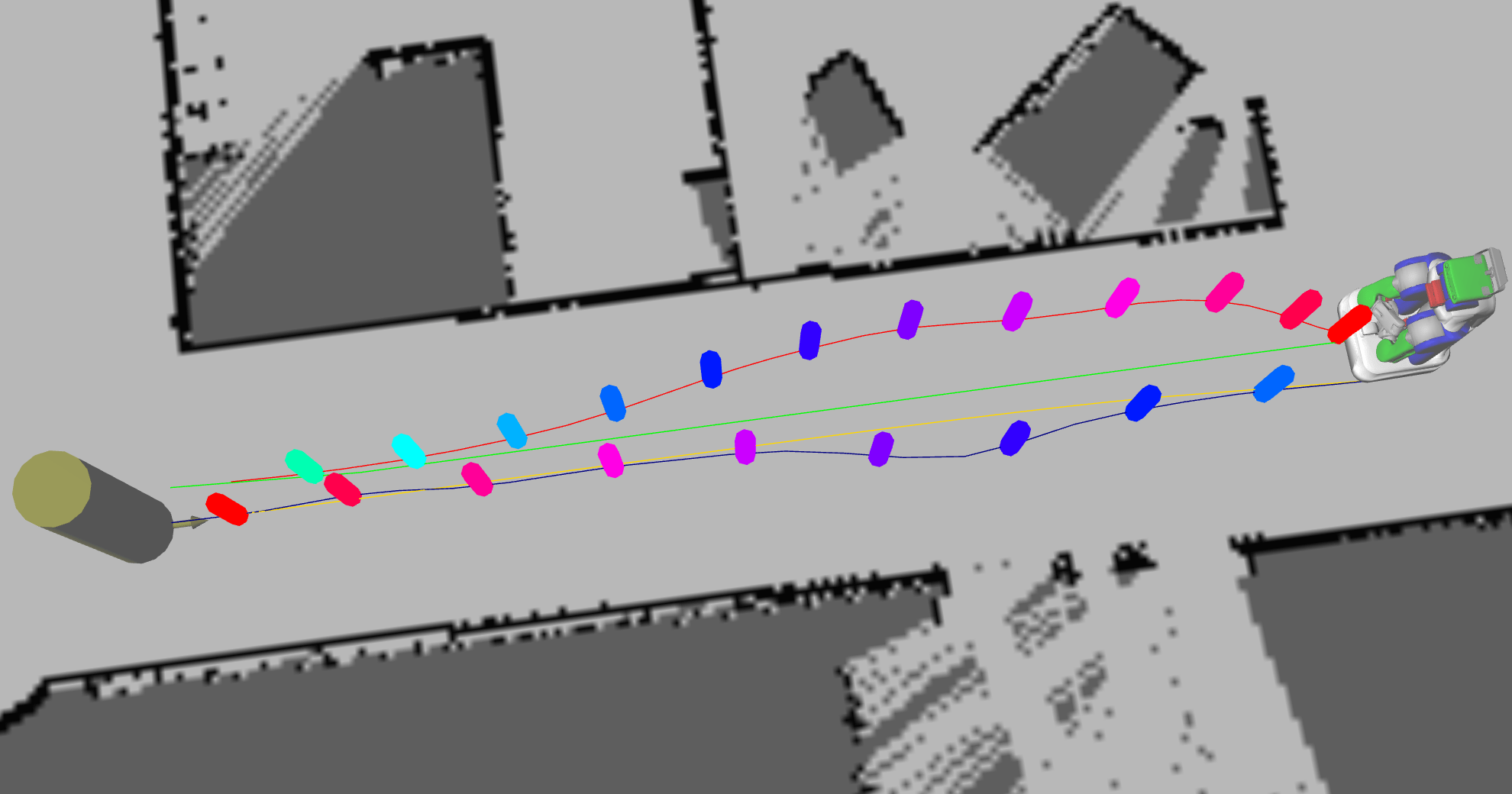
We claim that navigation in human environments can be viewed as cooperative activity especially in constrained situations. Humans concurrently aid and comply with each other while moving in a shared space. Cooperation helps pedestrians to efficiently reach their own goals and respect conventions such as the personal space of others. To meet human comparable efficiency, a robot needs to predict the human trajectories and plan its own trajectory correspondingly in the same shared space. In this work, we present a navigation planner that is able to plan such cooperative trajectories, simultaneously enforcing the robot’s kinematic constraints and avoiding other non-human dynamic obstacles. Using robust social constraints of projected time to a possible future collision, compatibility of human-robot motion direction, and proxemics, our planner is able to replicate human-like navigation behavior not only in open spaces but also in confined areas. Besides adapting the robot trajectory, the planner is also able to proactively propose co-navigation solutions by jointly computing human and robot trajectories within the same optimization framework. We demonstrate richness and performance of the cooperative planner with simulated and real world experiments on multiple interactive navigation scenarios.
In ISRR
Assessing the Social Criteria for Human-Robot Collaborative Navigation: A Comparison of Human-Aware Navigation Planners
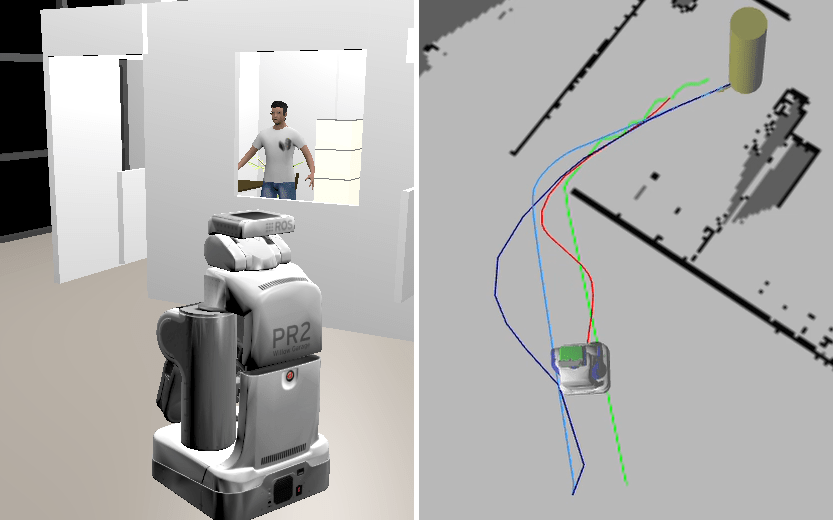
This paper focuses on requirements for effective human robot collaboration in interactive navigation scenarios. We designed several use-cases where humans and robot had to move in the same environment that resemble canonical path-crossing situations. These use-cases include open as well as constrained spaces. Three different state-of-the-art human-aware navigation planners were used for planning the robot paths during all selected use-cases. We compare results of simulation experiments with these human-aware planners in terms of quality of generated trajectories together with discussion on capabilities and limitations of the planners. The results show that the human-robot collaborative planner performs better in everyday path-crossing configurations. This suggests that the criteria used by the human-robot collaborative planner (safety, time-to-collision, directional-costs) are possible good measures for designing acceptable human-aware navigation planners. Consequently, we analyze the effects of these social criteria and draw perspectives on future evolution of human-aware navigation planning methods.
In RO-MAN

Head-Body Motion Coordination for Human Aware Robot Navigation
Mobile robots equipped with a pan-tilt head need to use gaze direction to manifest its navigational intents for more acceptable human-robot interaction. We frame control of such gaze behavior as multi-criteria decision-making problem, and provide a solution to synchronize gaze control with robot’s navigation planner. This approach is useful in the context of robot navigation, where it may be inapt to display only a predefined gaze pattern due to the dynamic nature of the scene. By enabling two behaviors, look-at-path and glance-at-human, we demonstrate the effectiveness of our approach on a real robotic platform in a path crossing scenario. Furthermore, we discuss results of a video based user study conducted with 126 participants showing improved communication of robot’s navigational intentions with the proposed approach.
In HFR